Итак, опробовав в деле свежесобраный квадрег, выяснил что управлять им не просто, а очень сложно. Ибо летит куда хочет, ветер сдувает. Горизонт вроде держит но как-то странно. Вывод какой - надо калибровать все датчики. Мануал нашёл, но проблемы всё-таки были из-за разных нюансов. В итоге вроде всё настроил, надо бы законспектировать на память.
Сонар (в роли альтиметра для удержания высоты до 5-ти метров) пока не подключал.
Текущие режимы: выбираются крутилкой HOV.THR на 5-м канале 0 - SIMPLE mode - компас удерживает курс, хорош для новичков. 1 - STABILIZE mode - акселерометр стабилизирует коптер по горизонту, хорош для полетов ФПВ. 2 - LOITER - удержание позиции и высоты. 3 - ALT_HOLD – удержание текущей высоты, стик газа должен быть на середине. 4 - RTL - возвращение на точку взлета на текущей высоте. 5 - ACRO mode - управление коптером только при помощи гироскопов.
Узнать магнитное склонение - . Для Москвы - 10° 18' EAST, т.е. вводим значение 10.18
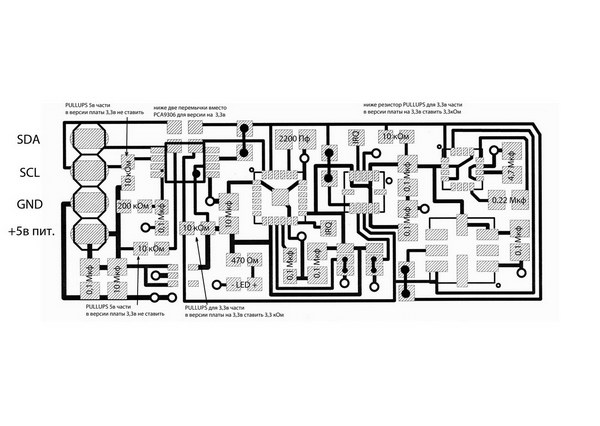
Распиновка платы датчиков (совместима с платой FFIMU v1.22L)




Dyez Четверг, 19 Апреля, 2012 16:14 цитировать ссылка на коммент
Gol Четверг, 19 Апреля, 2012 17:48 цитировать ссылка на коммент
Да ваще пипец. Ещё оказалось я забыл регули откалибровать, вот квадрик зависать на одном месте и не хотел.
Dyez Пятница, 20 Апреля, 2012 18:19 цитировать ссылка на коммент